
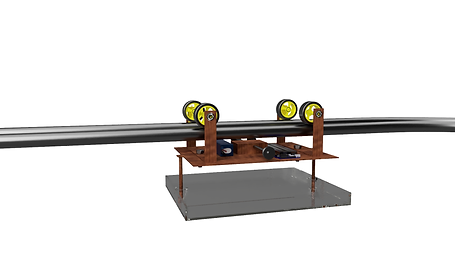
3D Model
Automatic Serving Robot
Smart Restarants
The Abstract

Due to health concerns, the world was not yet ready to visit restaurants after Covid-19. In an effort to eliminate human-to-human interaction, my team and I designed a robot to take orders and deliver meals in eateries.
The robot was raised to the ceiling to cause less of a barrier for current customers and to provide adaptability and a point of differentiation to the restaurant's partner.
Value Proposition
-
Ceiling Mounted Food Delivery System
-
Smart Tablet to order/ pay/ review the food
-
Supports flexible layout of the restaurant tables
-
Easy to understand and operate
-
One button operation
-
User-friendly application
-
Fast and reliable
User Journey

Designs
Prototype 1



Prototype 2



Circuit Diagram

Arduino Code
int echoPin = 8;
int trigPin = 12;
int dist;
int Pfwd = 3;
int Prev = 5;
int Mfwd = 9;
int Mrev = 6;
int btn = 2;
int motorSpeed = 150;
void setup()
{
pinMode(Pfwd, OUTPUT);
pinMode(Prev, OUTPUT);
pinMode(Mfwd, OUTPUT);
pinMode(Mrev, OUTPUT);
pinMode(btn, INPUT);
digitalWrite(btn, HIGH);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
}
void loop()
{
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
dist = pulseIn(echoPin, HIGH);
Serial.println(dist);
analogWrite(Mfwd,motorSpeed);
//if(digitalRead(btn) == 0){
if(dist <= 7000){
analogWrite(Mfwd,0);
delay(2000);
analogWrite(Prev,motorSpeed);
delay(1500);
analogWrite(Prev,0);
delay(3500);
analogWrite(Pfwd,motorSpeed);
delay(1500);
analogWrite(Pfwd,0);
delay(1500);
analogWrite(Mfwd,motorSpeed);
}
}
Logic of Code
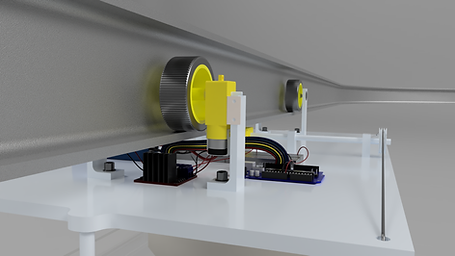
The logic of the code is not complicated. First, we measure the distance of objects away from the IR sensor. There are 2 sets of motors. One driver motor and one pulley motor. While the distance from IR sensor is greater than (>) say 5 cm, the driver motor will run. The motor will keep running until IR sensor detects an obstacle. When it does, the driver motor comes to a halt and after a delay the pulley motor runs in clockwise direction for ‘x’ seconds. Then pully motor rpm becomes 0. Then after a specific delay the pulley motor runs in an anticlockwise direction for same ‘x’ seconds. This ‘x’ sec depends on the distance between the robot and table. Once the platform is lifted the driver motor will run until it reached the kitchen.
Building A Prototype

Challenges & Learnings
-
Learning to code Arduino
-
Designing an app to work with the serving system
-
Designing the robot to be mounted on the ceiling
-
Implementing a tray/ platform to deliver food to the tables
-
Building a physical working prototype of the design
